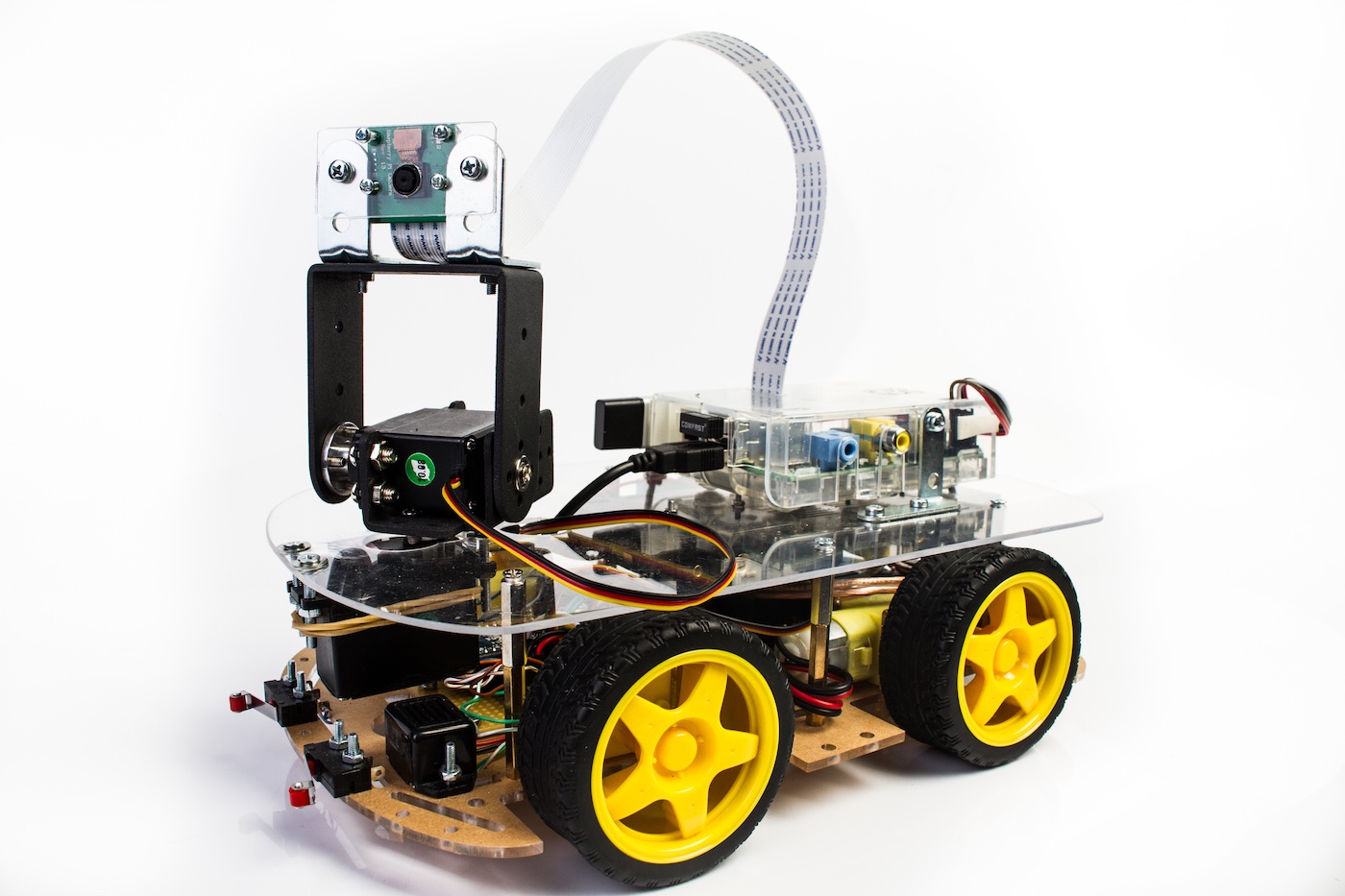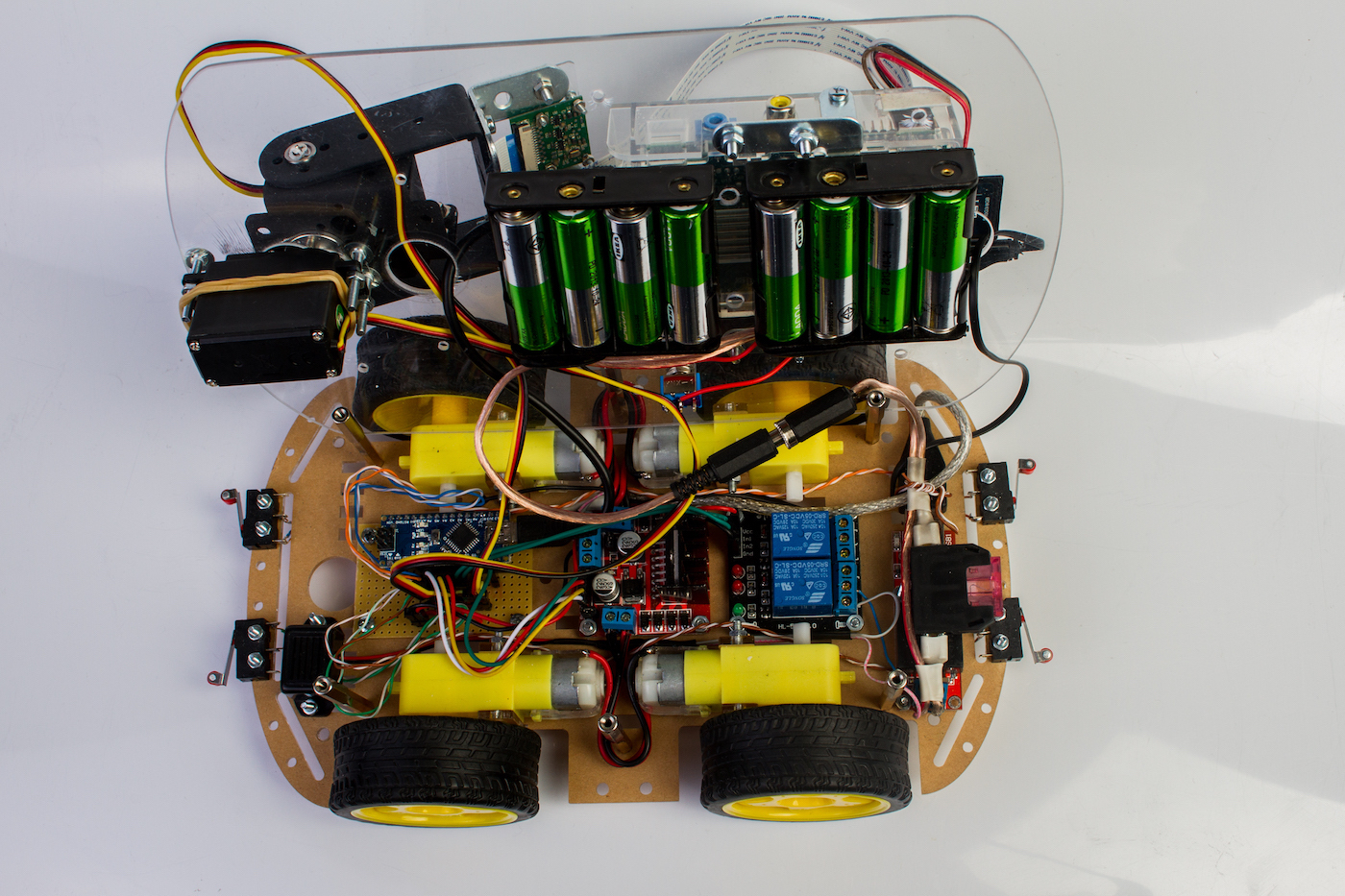
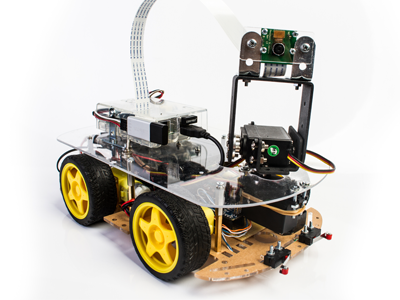
In this project I got the opportunity to combine two of my fields of interests: web technologies and robotics. The robot is a simple 4-wheeled car. One motor is directly connected to each wheel so the steering is similar to tank steering. The robot has touch sensors on the front and on the back so it can detect hitting obstacles. It also has a buzzer that can act as a horn. On the top of the robot there is a robotic arm with two degree of freedom that rotates and tilts the camera. The robot and its arm is controlled by an Arduino Nano which is connected to a Raspberry Pi via a serial interface. The Raspberry Pi is responsible for the camera and managing high level operations. It connects to a WiFi network and acts as a web server so the user who wants to use the robot can to this through its web page.
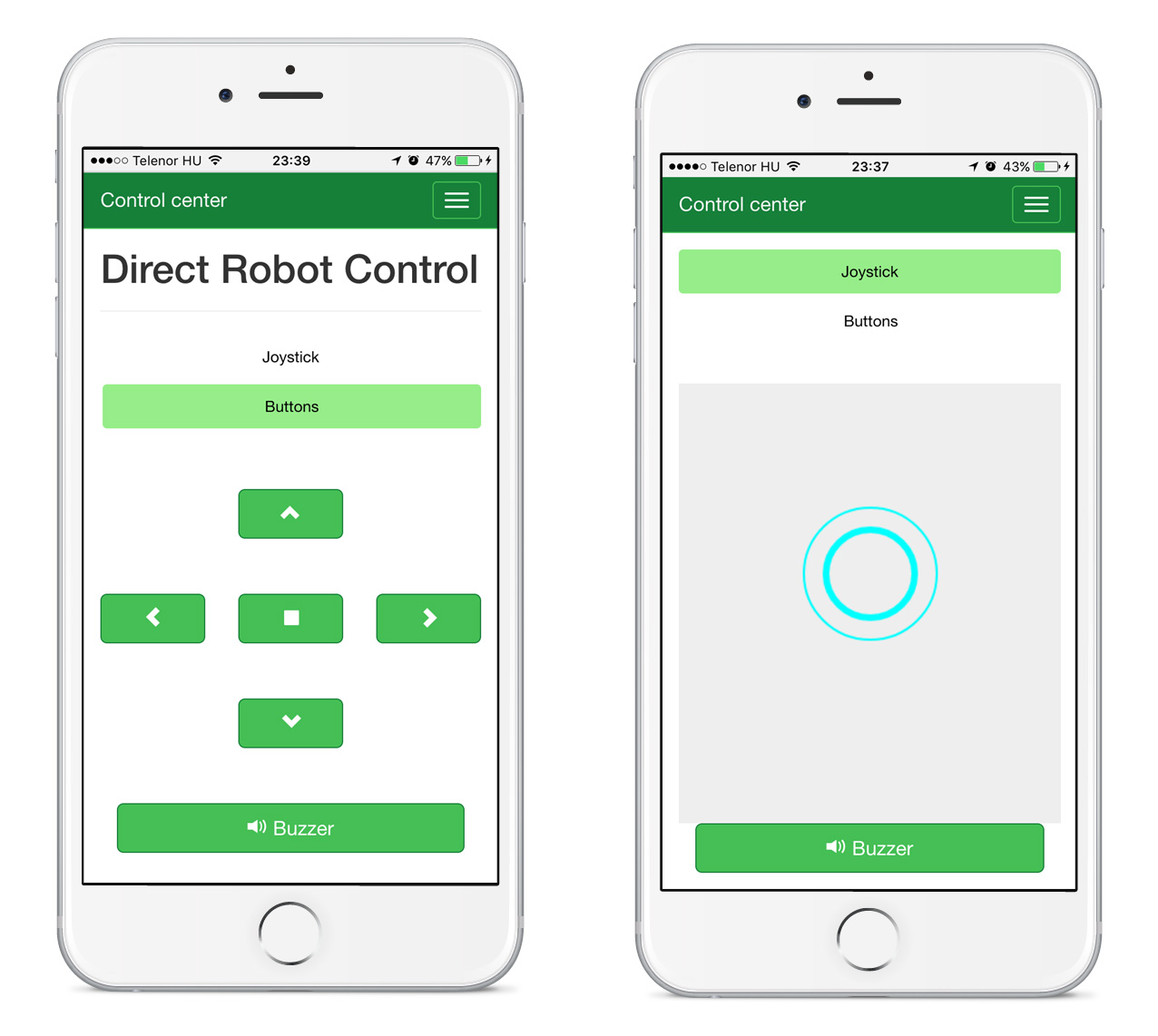
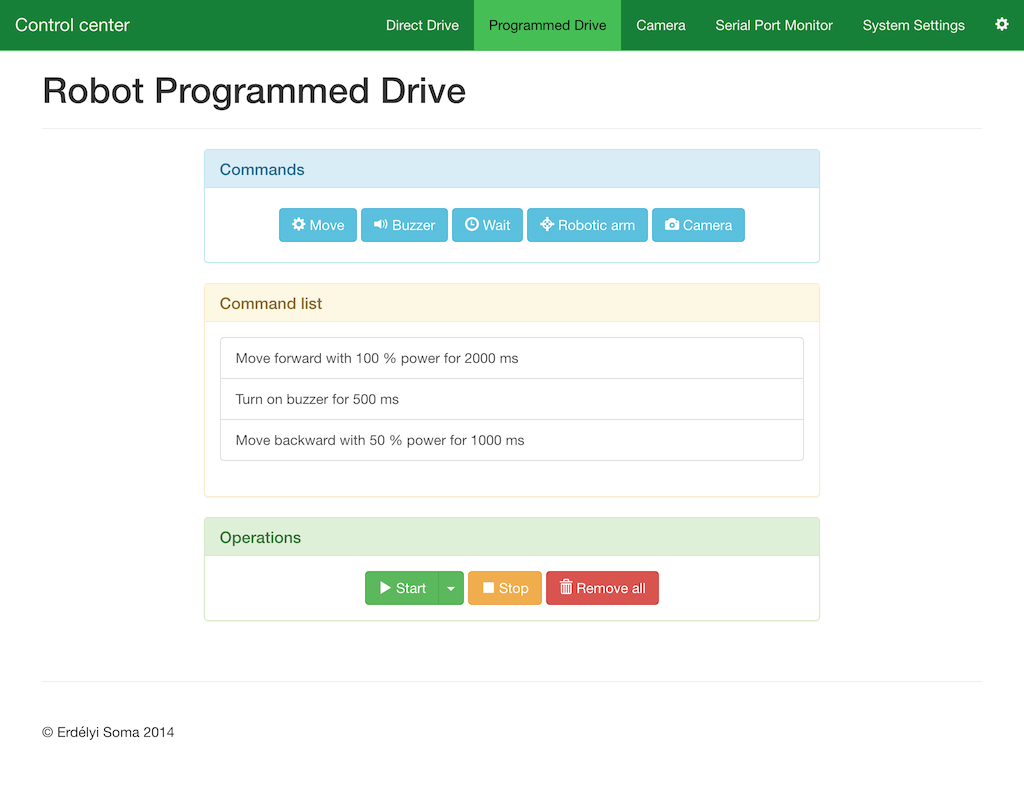
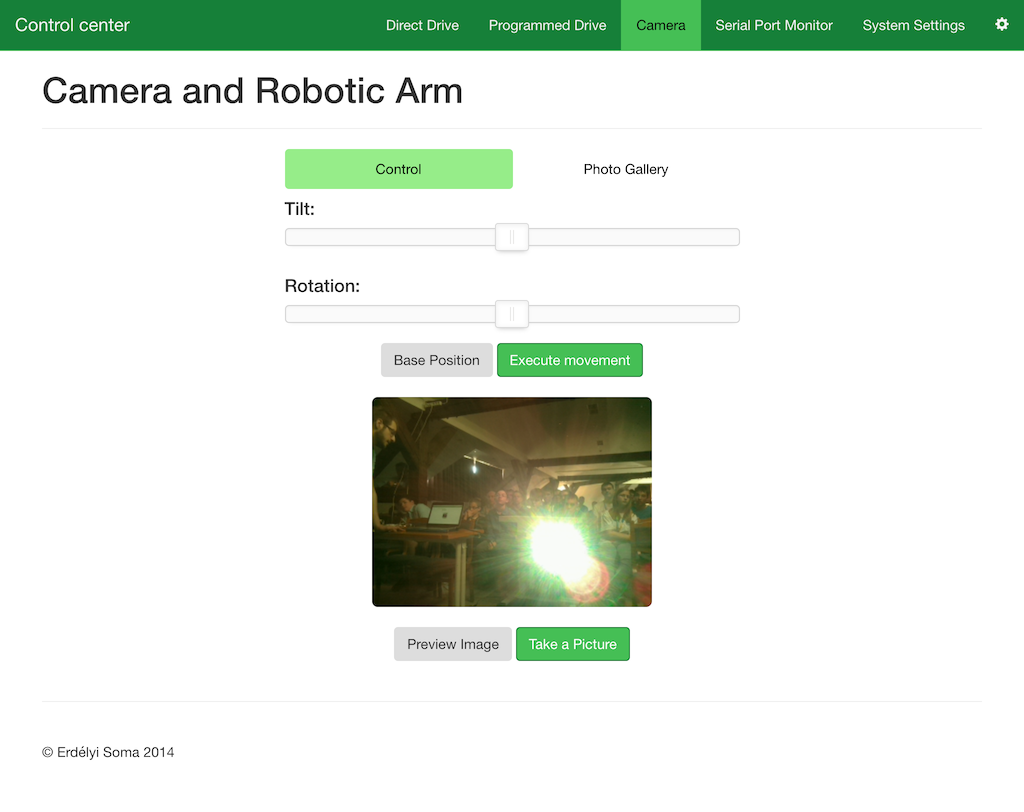
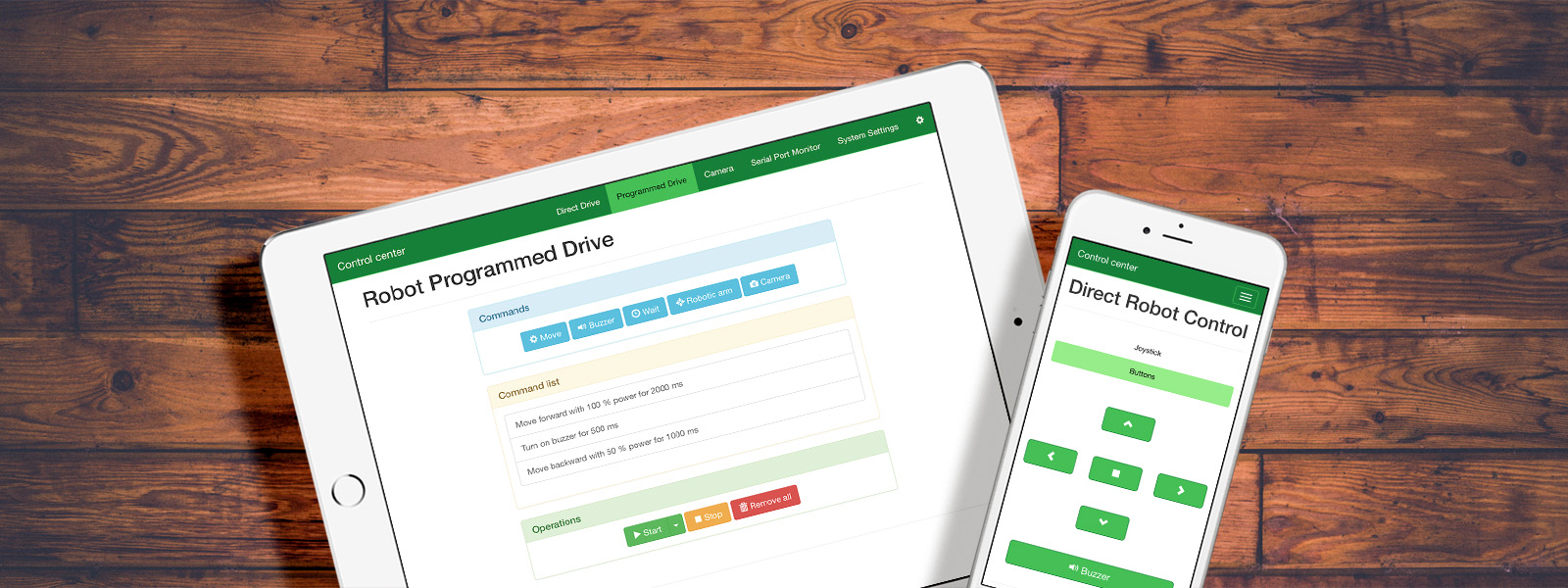
On the robot controlling webpage you can control the robot directly in two ways: either with directional buttons or a joystick for more precise speed and direction control. You can also control the robotic arm, take pictures and preview them on the site. Further more you can create lists of operations that the robot can execute autonomously like "go forward until you hit and obstacle, drive 2 second backwards and take a picture of the obstacle".
Although this robot was originally created for my university Project Laboratory course, later I further developed it and entered the "Present your own gadget" competition, organized by the László Schnell Foundation where I won second prize.