After we decided to stop the development of the first HidRoBot I wanted to create a new version from scratch to try out all the experience and knowledge we gathered while creating the first version. This is why the purpose of HidRoBot version 2 is pretty similar to the first: it is a remote controller robot boat that can carry sensors and measure different qualities of the water to help hydrologists with their work.
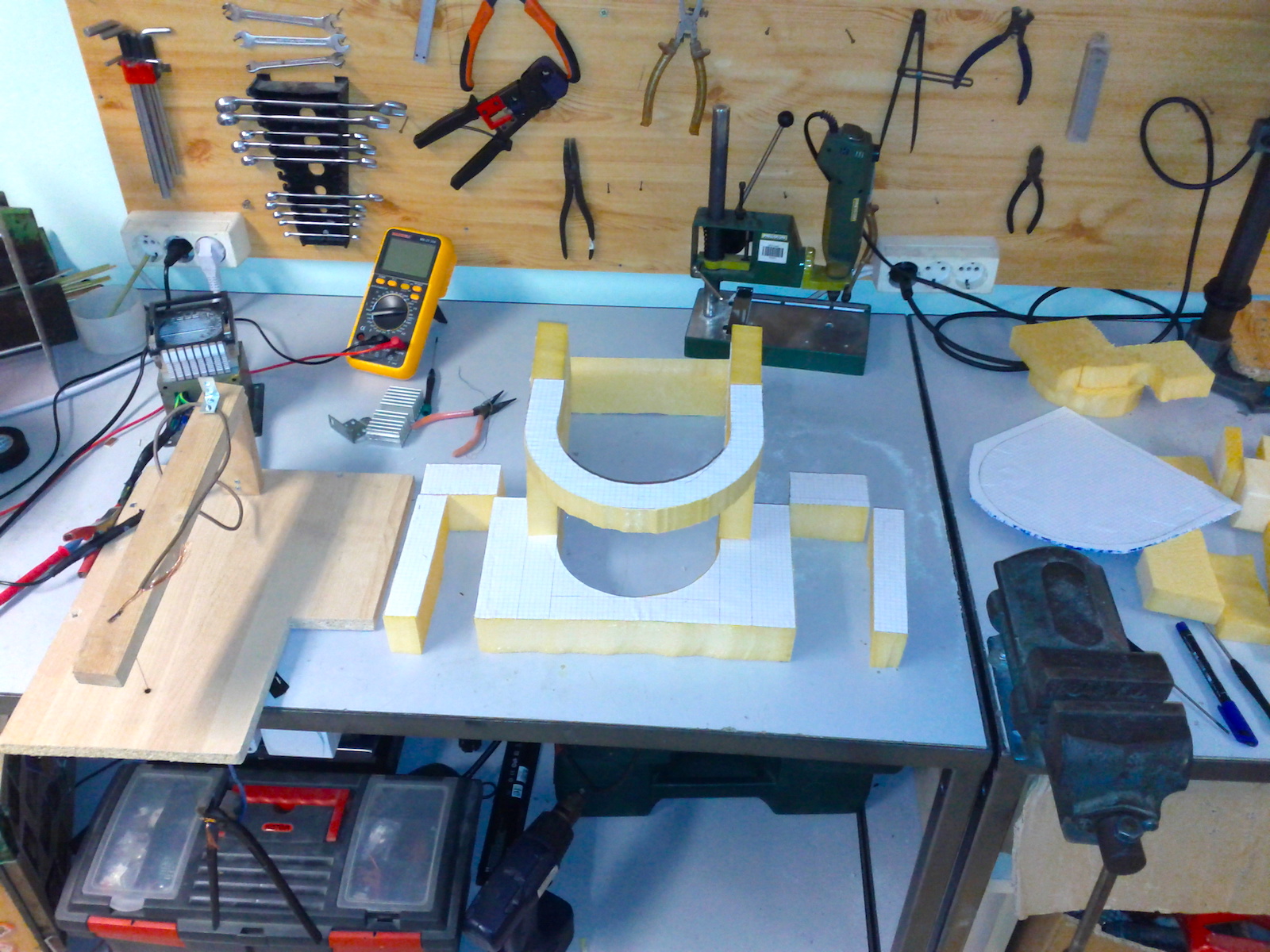
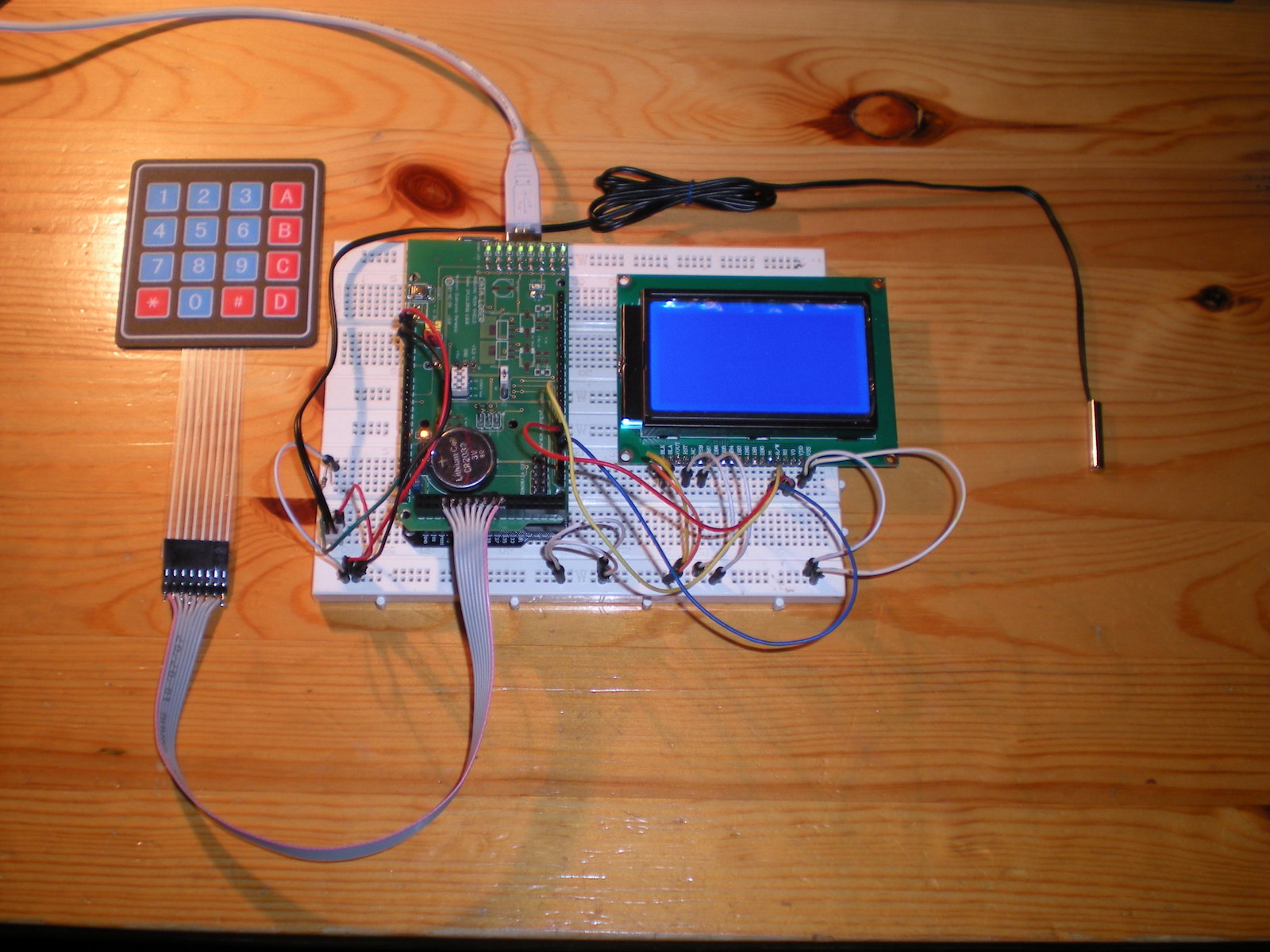
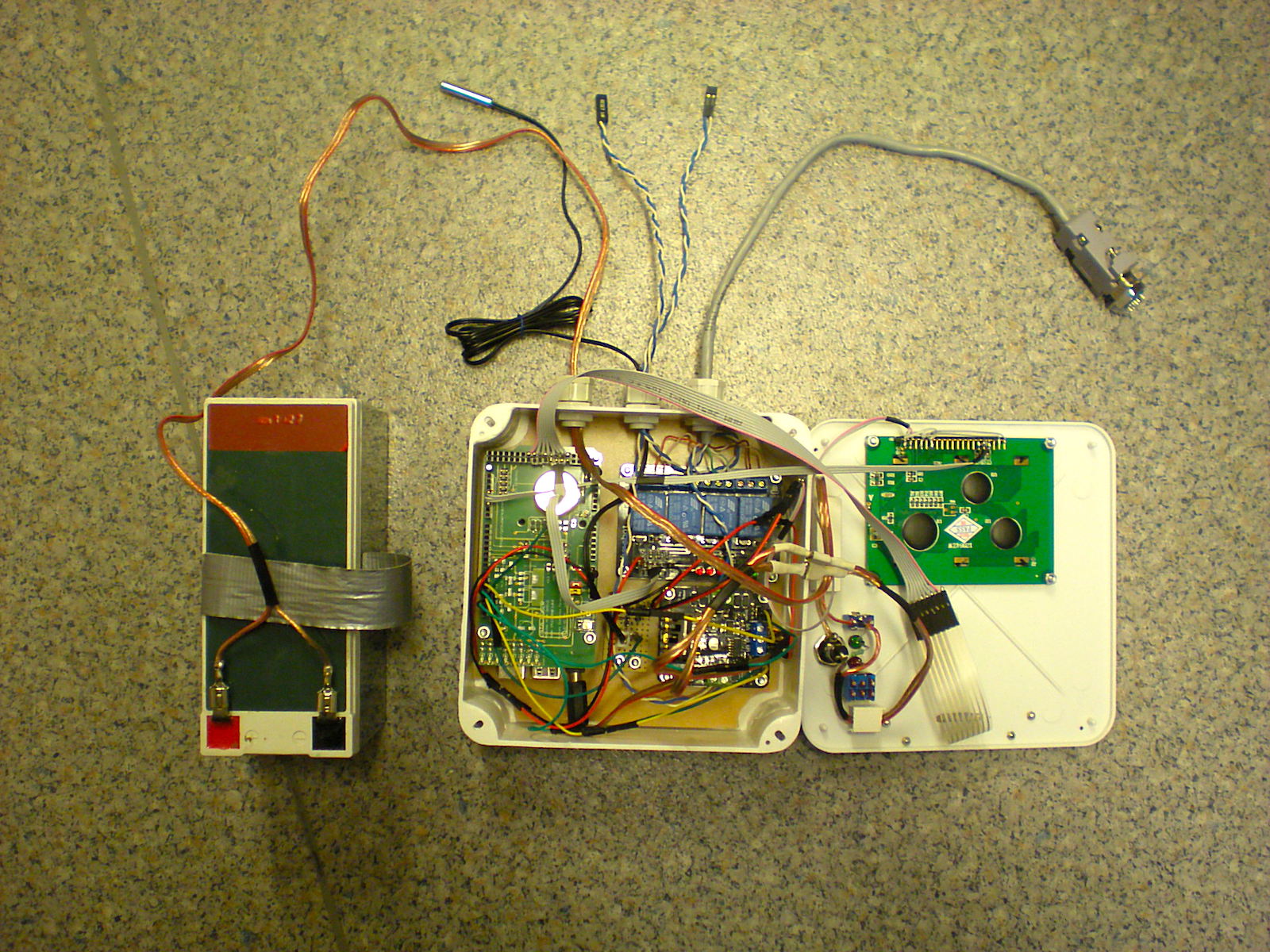
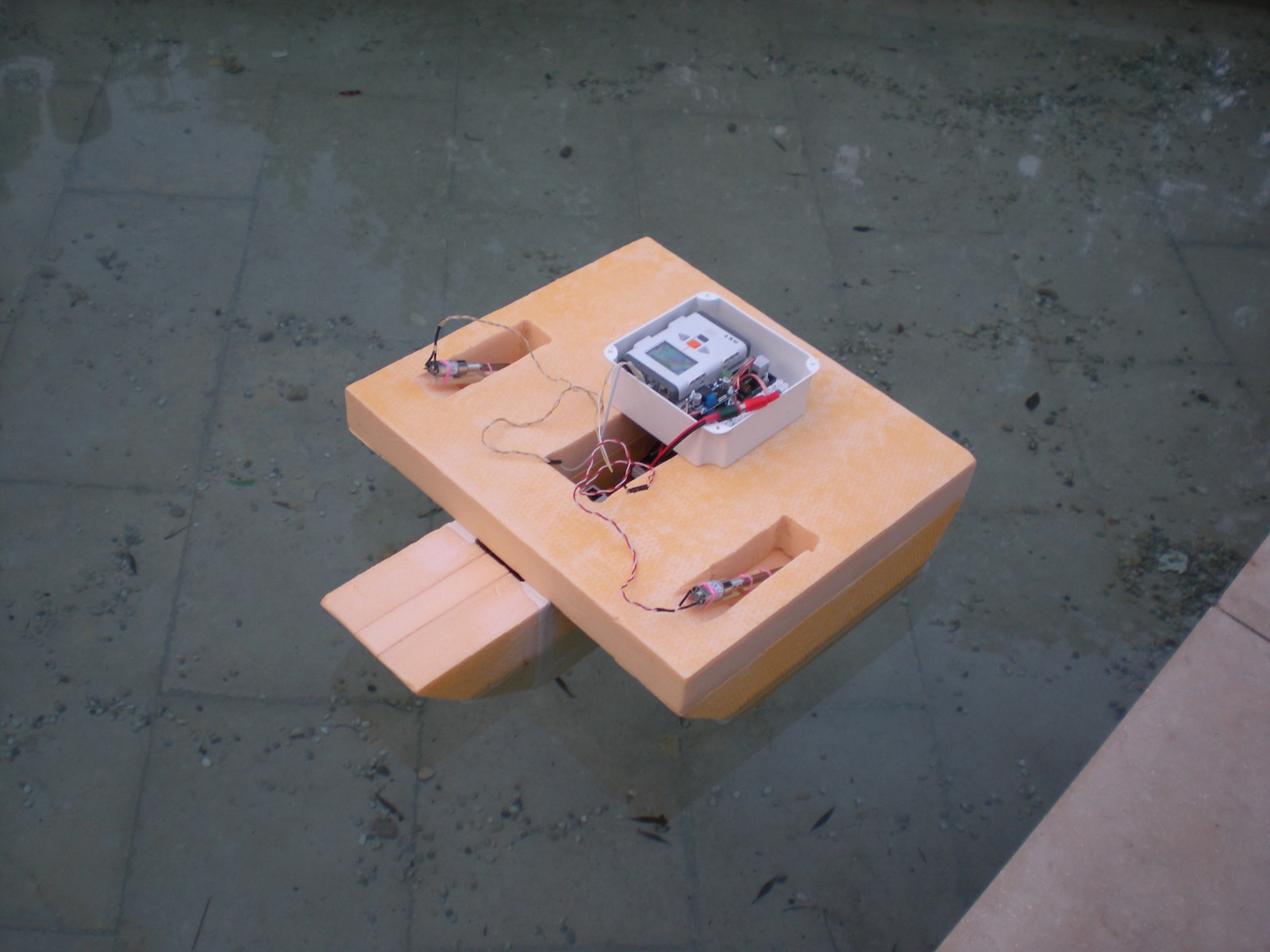
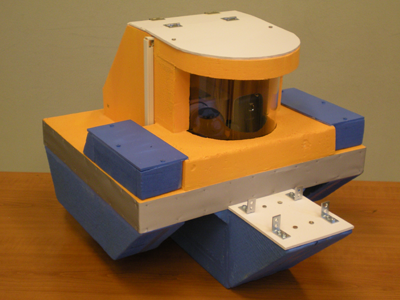
Instead of using an existing body and trying to fit everything inside, this time the whole ship is custom made from dense styrofoam. It has three hulls, the center one holds the heavy butteries for extra stability. Two propellers drive the boat each one of them is located in one of the side hulls. All the electronics are inside a secure box. This time the robot is controlled by an Arduino and has a large display with numeric inputs. An extra board is added on top of the Arduino that can measure different sensor values and log them on an SD card. In an early development phase the robot was controlled temporarily by a Lego Mindstorms NXT. On the front off the main hull there are secured mounting points for additional equipment or a robotic arm. Behind it there is a plastic windshield that protects the electronics and a phone holder. A smartphone can be inserted into the phone holder for live camera feed and additional computing power.
The project was unfortunately abandoned before I could finish it but I learned a lot on both the hardware and the software side of the development.